Qiyuan Qiao
乔启元
School of Computing and Data Science
The University of Hong Kong
About Me
I am a Ph.D. student at the School of Computing and Data Science, The University of Hong Kong, supervised by Prof. Dong Xu and Prof. Peng Lu, working on robotics and mechanical engineering. My research focuses on robotic grasping and manipulation, including the development of adaptive grippers and the integration of computer vision and tactile sensing for intelligent object handling. During my undergraduate studies at Zhejiang University, I received guidance from Prof. Jian Chen and Prof. Weifei Hu.
Education
- Ph.D. in Computer Science (2023-present), School of Computing and Data Science, The University of Hong Kong
- M.Sc. in Mechanical Engineering (2022-2023), The University of Hong Kong
- B.Eng. in Mechatronics Engineering (2018-2022), Zhejiang University
Research Interests
- Robotic Grasping and Manipulation: Adaptive grippers, dynamic object interaction, and contact-rich manipulation.
- 3D Perception for Robotics: 3D reconstruction and scene understanding for navigation and manipulation.
- Embodied Intelligence: AI and sensor fusion for robust robotic control.
News
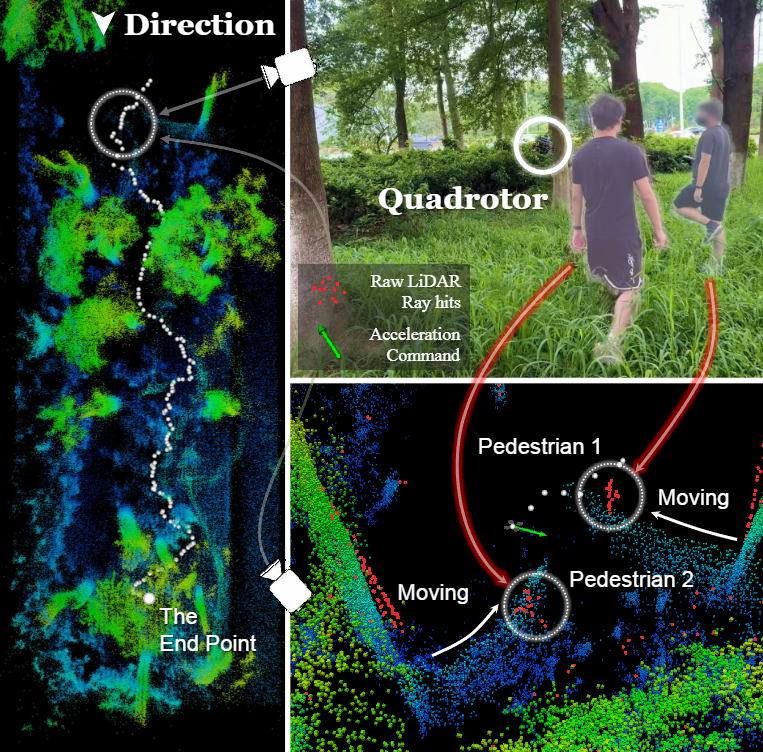
- [Nov. 2025] Our paper “Flow-Aided Flight Through Dynamic Clutters From Point to Motion” has been accepted to IEEE Robotics and Automation Letters (RA-L).
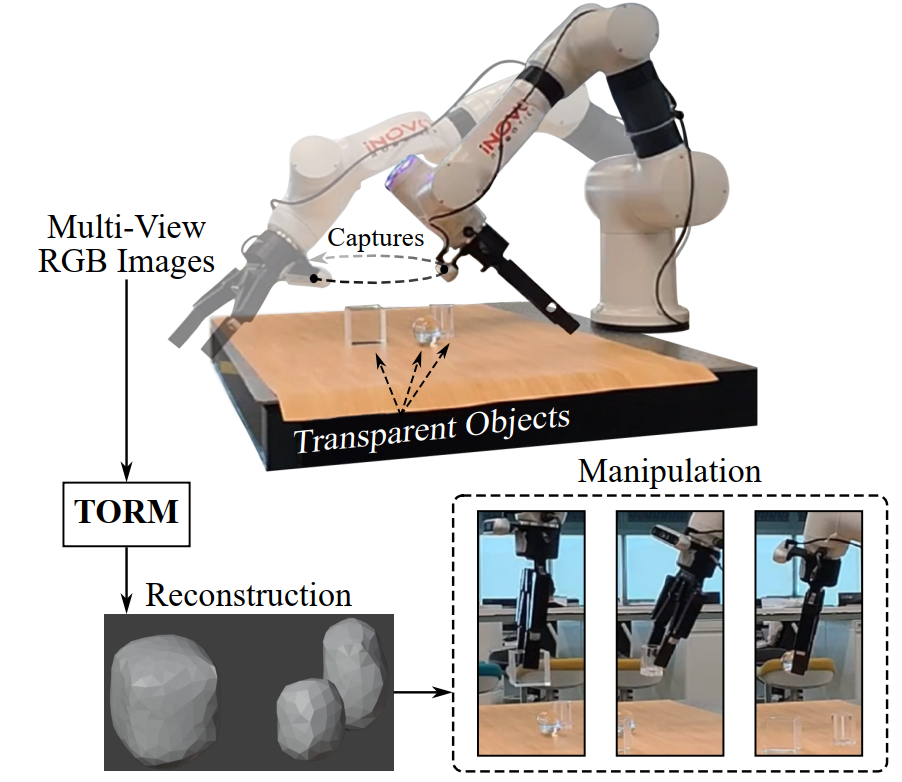
- [Nov. 2025] Our paper “TORM: Transparent Objects Reconstruction and Manipulation With Multi-View Segmentation” has been accepted to IEEE Robotics and Automation Letters (RA-L).
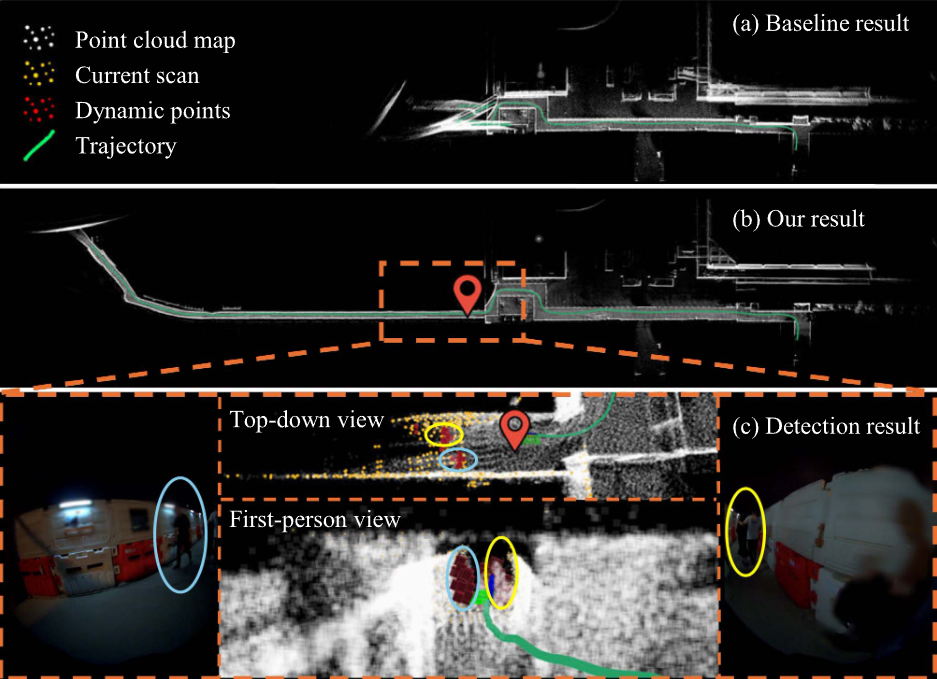
- [Oct. 2025] Our paper “Breaking the Static Assumption: A Dynamic-Aware LIO Framework via Spatio-Temporal Normal Analysis” has been accepted to IEEE Robotics and Automation Letters (RA-L).
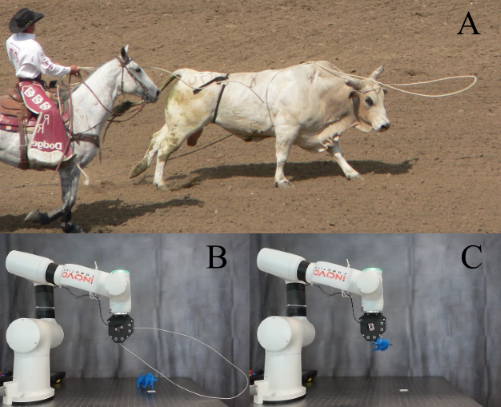
- [Oct. 2025] Our paper “Lasso Gripper: A String Shooting-Retracting Mechanism for Shape-Adaptive Grasping” has been accepted to ROBIO 2025.
- [Dec. 2022] My patent “Wire-controlled flexible manipulator” (CN218110822U) has been granted.
Publications
-
 RA-L
IEEE Robotics and Automation Letters
RA-L
IEEE Robotics and Automation Letters -
 RA-L
IEEE Robotics and Automation Letters
RA-L
IEEE Robotics and Automation Letters -
 RA-L
IEEE Robotics and Automation Letters
RA-L
IEEE Robotics and Automation Letters -
 ROBIO
IEEE International Conference on Robotics and Biomimetics (ROBIO), 2025.
ROBIO
IEEE International Conference on Robotics and Biomimetics (ROBIO), 2025. -
 Patent
Patent
Services
Reviewers
ICRA 2025, IROS 2025, RA-L, npj Artificial Intelligence
Teaching Assistant
CCST9050 Robot: Flesh, Machines, Intelligence, The University of Hong Kong COMP3278 Introduction to database management systems, The University of Hong Kong
Loading ClustrMaps...
Powered by Jekyll and Minimal Light theme.